
What’s SP-Automation?
| ROS2 × EatherCAT |
“a high-level system (ROS2) capable of complex operations”
and
“a local system (EtherCAT) capable of high-speed control.”
With SP-Automation, users without advanced know-how and technology can easily develop robots.
Solving robot development issues with SP-Automation
Are you in trouble because of the high technical hurdles in robot development?
for example···
☞ “Outstanding technical know-how” for developing robots
☞ “Securing engineers” that make full use of technology
☞ “Enormous development man-hours” for trial production and development
☞ “Complex operation” to operate various systems in cooperation
☞ “Huge cost” for everything

With the support of SP-Automation and Kobot, we will solve technical problems!
Significantly reduce the development man-hours for electrical design, network design, and software design !!
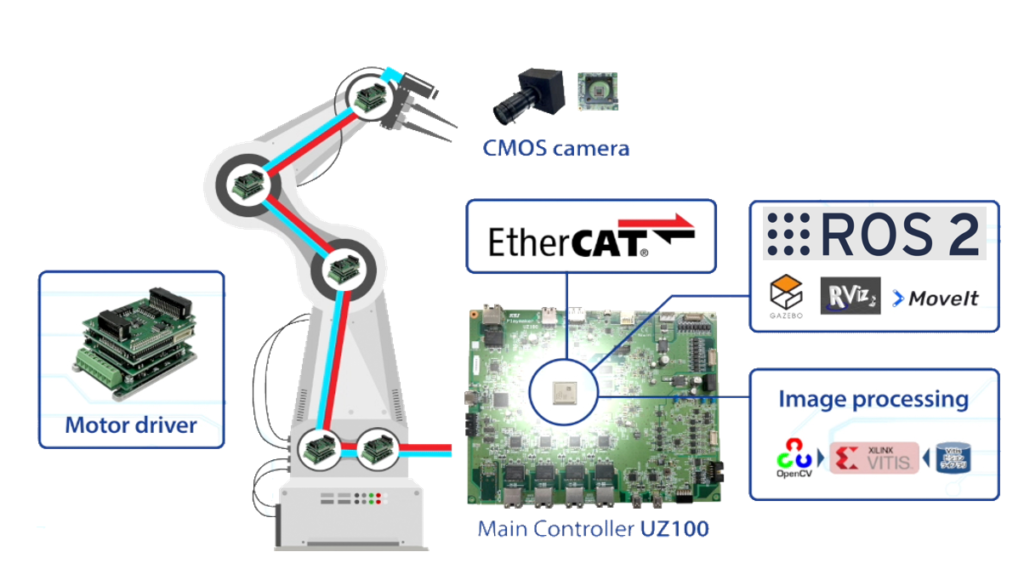
|SP-Automation image
|ROS2
SP-Automation utilizes ROS2.
1.What’s ROS2?
ROS stands for “Robot Oparation System” and is an open source software platform for robot development.
Development of ROS2 started in 2014 to solve the problems of conventional ROS, and it will be an upgraded version officially released in 2017.
The main obstacle to robot development and engineer training was the difficulty of imagining the movement of the robot on the operation screen full of characters with the joint values listed.
However, if you use ROS2, which is an open platform, you can use intuitive and abundant tools for free, and you can supplement functions that are difficult to develop in-house, so the usage is increasing rapidly now.
ROS2 is the key to reducing the difficulty of robot development and creating engineer resources.
2.Respond to increasing needs for utilizing AI technology
The need for AI utilization is steadily increasing due to highly automated processing, but it has required advanced technical capabilities and time to realize it.
By utilizing the ROS2 application, motion planning, reverse motion, visualization, collision check, and control are automatically calculated, making it easy to build a deep learning mechanism and significantly lowering the hurdles for AI utilization.
In particular, the standard applications Play Maker and Move It provide intuitive operation and 3D graphics, which enables easy operation on the touch panel and enables the construction of AI without the need for advanced knowledge and experience. ..
|EatherCAT
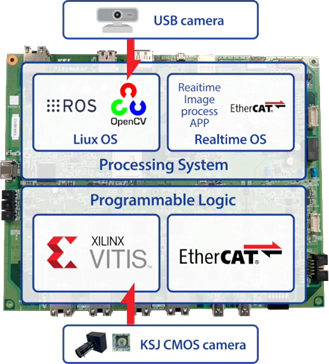
In SP-Automation, the API for EtherCAT communication management and the IP core manage the DDS communication, which is the ROS2 standard communication protocol, using the control controller developed independently, and quickly transfer a large amount of data via the API for ROS2⇔EtherCAT. It is possible to send and receive.
In the conventional field network, it was necessary to add a dedicated communication chip to the controller, but with this controller board, existing Ethernet assets can be diverted and used as a control computer without adding special hardware. Is possible.
|Image processing technology
SP-Automation makes it easy to build teaching programs for robot systems such as pick and place by utilizing applications that capture image data from CMOS image sensors and perform image processing.
|Various controller boards
1.Main controller control board (UZ100)
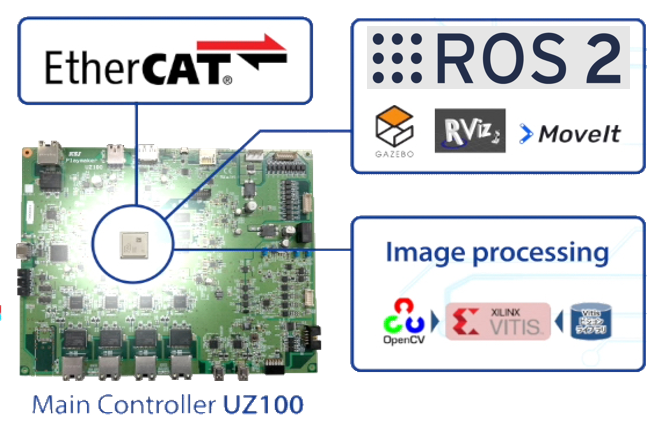
UZ100 is a control board equipped with many interfaces for controlling ROS2, EtherCAT, and image processing.
| Board Size | Main IC |
|---|---|
| 250 × 200 mm | AMD Xilinx Ultrascale + MPSoC |
2.DC Servo Motor Driver Board(Kyros)
SP-Automation develops the Kyros series of driver boards that are optimal for DC servo motor control.。